










張經(jīng)理
銷售經(jīng)理
掃一掃,微信聯(lián)系

您好, 歡迎來到塑料機(jī)械網(wǎng)! 登錄| 免費(fèi)注冊| 產(chǎn)品展廳| 收藏商鋪|

18340091069
當(dāng)前位置:濟(jì)南恒樂興科儀器有限公司>>反力架加載裝置>>自平衡反力架>> 濟(jì)南恒樂儀器自升降反力架系統(tǒng)
產(chǎn)品型號
品 牌
廠商性質(zhì)生產(chǎn)商
所 在 地濟(jì)南市
更新時間:2023-02-28 08:30:56瀏覽次數(shù):1023次
聯(lián)系我時,請告知來自 塑料機(jī)械網(wǎng)
張經(jīng)理





濟(jì)南恒樂儀器自升降反力架系統(tǒng)
濟(jì)南恒樂儀器自升降反力架系統(tǒng)
電液伺服加載系統(tǒng)
多通道協(xié)調(diào)加載
水平加載系統(tǒng)
擬動力加載試驗(yàn)
千斤頂檢定裝置
多功能結(jié)構(gòu)力學(xué)試驗(yàn)裝置
自升降反力架
鋼桁架靜載荷實(shí)驗(yàn)系統(tǒng)
長柱結(jié)構(gòu)試驗(yàn)系統(tǒng)
鋼桁架加載試驗(yàn)系統(tǒng)
電液伺服多功能結(jié)構(gòu)試驗(yàn)系統(tǒng)
反向架
自平衡反力架
自平衡反力系統(tǒng)套裝
大型結(jié)構(gòu)試驗(yàn)系統(tǒng)
簡支梁反力框架試驗(yàn)系統(tǒng)
構(gòu)件疲勞試驗(yàn)系統(tǒng)
鋼筋混凝土梁虛擬受彎試驗(yàn)系統(tǒng)
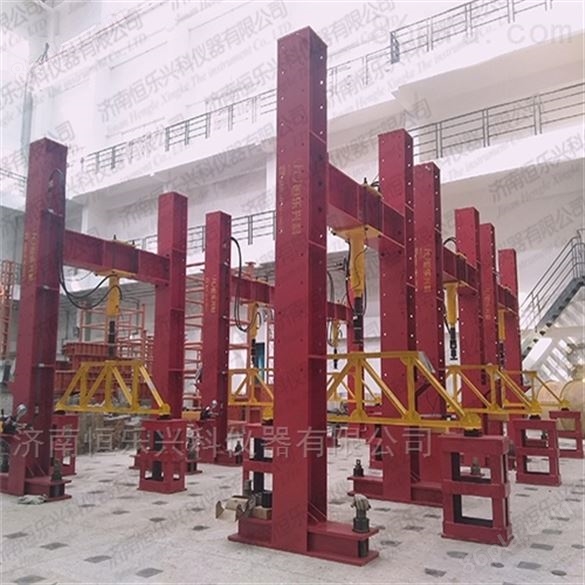
自升降反力架系統(tǒng)

一、加載反力架
1.加載反力架采用四立柱框架結(jié)構(gòu),立柱可通過地腳拉桿與實(shí)驗(yàn)室臺座錨孔連接,主梁可自動升降,到達(dá)固定位置后可通過螺栓鎖緊,主梁采用箱型截面設(shè)計,采用中間鏤空的雙梁結(jié)構(gòu);
2.四立柱軸間距為不小于4m×2m,立柱不高于7m,大試驗(yàn)高度不小于4.5m;
3.豎向作動器采用前法蘭安裝,作動器高度與主承載梁高度共用,增加實(shí)驗(yàn)空間;
4.加載反力架豎向承載力不小于4000kN、水平承載力不小于1000kN,額定荷載下反力架各構(gòu)件大變形量不大于跨度的1/1000;(提供加載設(shè)備三維、效果圖、有限元變形及應(yīng)力分析報告復(fù)印件)
5.鋼構(gòu)件材料均為Q355B結(jié)構(gòu)鋼,焊后消除焊接應(yīng)力;構(gòu)件工作面均進(jìn)行機(jī)加工,表面粗糙度不大于R3.2;鉆孔采用數(shù)控加工的方式,間距誤差±0.1mm;鋼構(gòu)表面噴漆前噴砂除銹;
6.配置四根立柱,Ⅱ型結(jié)構(gòu),尺寸不小于375×375×6000mm,抗拔承載力不小于1000kN;側(cè)面按125mm模數(shù)加工安裝孔,保證橫梁高度按模數(shù)調(diào)整;
7.配置上部副梁4支,槽型結(jié)構(gòu),橫截面尺寸不小于500×200mm,梁跨中承載力不小于1500kN;
8.配置下部副梁4支,槽型結(jié)構(gòu),橫截面尺寸不小于250×200mm;
9.配置主梁1支,采用箱型截面中間鏤空的雙梁結(jié)構(gòu),橫截面尺寸不小于900×1100mm,承載力不小于3000kN;下部設(shè)置通長直線導(dǎo)軌,可在其上安裝隨動小車平臺;
10.臺座拉桿及螺母16根,尺寸不小于1300×φ64mm;墊板16個,尺寸不小于180×180×20mm。
11.配置隨動小車平臺2套,用于安裝豎向作動器,采用直線導(dǎo)軌滑塊的方式;承載力不小于2000kN;額定荷載下滑動摩擦系數(shù)≤1%;
12.水平作動器連接板1件,用于連接作動器及反力墻;T型槽板結(jié)構(gòu),作動器高度可連續(xù)調(diào)節(jié),承載力不小于1000kN。
二、豎向作動器
1.豎向作動器采用,前法蘭安裝,單出桿結(jié)構(gòu),大壓縮荷載不小于2000kN,大拉伸荷載不小于500kN,作動缸滿行程不小于300mm (±150mm) ,配拉簧式萬向球鉸;
2.滿荷載對應(yīng)的工作壓力不大于25MPa,油缸耐壓不小于30MPa,啟動壓力小于0.1MPa;
3 .配置有2000kN載荷傳感器,可以承受不低于滿量程50%大過載,載荷傳感器精度(非線性、遲滯、重復(fù)性等)不低于滿量程的0.1%;
4.作動缸同軸安裝有安裝磁置伸縮式位移傳感器;
5.配套作動器提升吊環(huán)與安置地墊,提升吊環(huán)用于平衡吊裝作動器,安置地墊用于防止放置作動器時意外損壞;
6.所有控制電纜及接頭應(yīng)滿足屏蔽性好、抗干擾性強(qiáng)、結(jié)實(shí)耐用、易安裝要求,長度以實(shí)際場地要求為準(zhǔn);
7.所有液壓軟管及接頭應(yīng)滿足抗壓性好、密閉性好,易安裝,液壓管道長度以實(shí)際場地要求為準(zhǔn)。
三、伺服控制系統(tǒng)
1.伺服控制系統(tǒng)與伺服油源配合使用,可實(shí)現(xiàn)不少于4個作動器的力、位移電液伺服閉環(huán)控制協(xié)調(diào)加載;
2.試驗(yàn)軟件可根據(jù)用戶給定的數(shù)據(jù)進(jìn)行設(shè)計,能進(jìn)行壓剪實(shí)驗(yàn)豎向雙缸協(xié)同加載,采用主動控方案確保實(shí)驗(yàn)過程中L梁始終保持水平狀態(tài)。同時提供三缸同步的控制系統(tǒng),壓剪試驗(yàn)時豎向兩次缸采用位移跟隨主缸、加載力的和為定值的控制方式,壓梁兩端高差不大于0.2mm。可有效保證加載橫梁水平。(提供豎向加載雙缸協(xié)調(diào)案例說明,并做技術(shù)特點(diǎn)分析,格式自定)
3.系統(tǒng)在全程閉環(huán)控制狀態(tài)下,應(yīng)具備力控、位移控制等多種控制功能,并且在試驗(yàn)過程中應(yīng)能夠?qū)崿F(xiàn)所有控制方式以及控制速率的任意無沖擊平滑切換;
4.控制系統(tǒng)的主要參數(shù)(荷載、位移等)應(yīng)能通過模擬輸出或數(shù)字輸出等形式將系統(tǒng)信號傳輸給外部數(shù)據(jù)采集系統(tǒng),實(shí)現(xiàn)控制系統(tǒng)與外部數(shù)據(jù)采集系統(tǒng)進(jìn)行同步采集的功能要求;
5 .擬采用的伺服控制系統(tǒng)需具或軟件著作權(quán)證書
6.配置擬動力實(shí)驗(yàn)軟件1套
6.1軟件應(yīng)具有良好的用戶界面,試驗(yàn)前能夠交互式輸入地震加速度時程曲線,選取試驗(yàn)所需范圍的加速度時程,建立樓層的滯回模型。
6.2試驗(yàn)過程中能夠?qū)崟r顯示各樓層的地震響應(yīng)時程曲線、樓層的滯回曲線、結(jié)構(gòu)振動動畫,以及與試驗(yàn)設(shè)備之間的指令和反饋數(shù)據(jù)交互。試驗(yàn)結(jié)束后能顯示樓層的滯回曲線,輸出子結(jié)構(gòu)擬動力試驗(yàn)的相關(guān)結(jié)果。
6.3試驗(yàn)軟件能夠和電液伺服試驗(yàn)系統(tǒng)控制軟件連接通訊,能夠?qū)⒔Y(jié)構(gòu)時程分析得到的試驗(yàn)子結(jié)構(gòu)加載指令發(fā)送給試驗(yàn)控制系統(tǒng),并實(shí)時獲取試驗(yàn)子結(jié)構(gòu)的位移和力響應(yīng),能夠設(shè)定相關(guān)的判斷準(zhǔn)則來決定結(jié)束一個試驗(yàn)步,保證子結(jié)構(gòu)擬動力試驗(yàn)平穩(wěn)進(jìn)行。
6.4試驗(yàn)軟件需要具有網(wǎng)絡(luò)化的試驗(yàn)功能;
6.5擬動力實(shí)驗(yàn)系統(tǒng)、虛擬仿真軟件需具有軟件著作權(quán)證書。(
7.配備在線式UPS電源,UPS與多通道數(shù)字控制器系統(tǒng)實(shí)時通訊,當(dāng)出現(xiàn)電池電量低、外部電源斷電等意外時,能夠自動停止當(dāng)前試驗(yàn)并保存所有試驗(yàn)數(shù)據(jù);
8.配壓剪模型1套,采用裝配式結(jié)構(gòu),可組裝成單榀多層框架模型、框剪結(jié)構(gòu)模型等,可進(jìn)行單榀多層框架內(nèi)力分布實(shí)驗(yàn)、壓剪滯回實(shí)驗(yàn)等,模型桿件剛度可調(diào),至少配三種剛度的桿件,且剛度比不小于3,基礎(chǔ)桿件截面尺寸不小于50x50mm;橫梁和立柱之間聯(lián)接可剛接、可鉸接,可任意轉(zhuǎn)換;可承受豎向荷載不小于1000kN,水平荷載不小于250kN,總高度2m,層數(shù)可調(diào),不少于3層;實(shí)測實(shí)驗(yàn)數(shù)據(jù)與理論值比誤差小于5%;
9.配置鋼筋混凝土虛擬仿真軟件1套:虛擬仿真需包含場景仿真、實(shí)驗(yàn)原理仿真、實(shí)驗(yàn)操作仿真、解析解仿真、有限元仿真、相關(guān)測試技術(shù)五個模塊;其中場景仿真需采用沉浸式的三維仿真環(huán)境,提供360度體驗(yàn),通過3D仿真實(shí)驗(yàn)裝置交互式操作,產(chǎn)生和實(shí)際操作一致的實(shí)驗(yàn)過程和現(xiàn)象;解析解仿真需要提供完整的可修改的系列變量算例模型,可選少筋梁、適筋梁、超筋梁3種典型試件,鋼筋直徑、砼強(qiáng)度等均可連續(xù)變化;操作過程仿真需包含試件安裝、加載、數(shù)據(jù)采集等步驟,需與實(shí)際操作相符,需展示實(shí)驗(yàn)過程中加載測試方案、試件的變形、需要測試的實(shí)驗(yàn)數(shù)據(jù)及數(shù)據(jù)的變化趨勢、數(shù)據(jù)采集分析方案等;有限元仿真需要提供算例庫,并采用PPT格式文件對算例進(jìn)行總結(jié)。
四、伺服油源系統(tǒng)
1.采用伺服電機(jī)驅(qū)動油泵,可根據(jù)工作需要調(diào)整轉(zhuǎn)速,系統(tǒng)流量不低于10LPM;
2.油源壓力可分手動控制和伺服控制兩種控制模式,手動控制壓力輸出不少于2路,0-28MPa連續(xù)可調(diào),伺服控制壓力輸處不少于3路,0-28MPa連續(xù)可調(diào),可進(jìn)行荷載、位移閉環(huán)控制;
3.采用觸摸屏作為伺服控制操作終端,可實(shí)時顯示各通道系統(tǒng)參數(shù),同時設(shè)有手搖脈沖發(fā)生器作為手動控制單元;
4.根據(jù)現(xiàn)場實(shí)際需要配置冷卻系統(tǒng);
5.根據(jù)試驗(yàn)系統(tǒng)要求提供全部工作用油;
6.當(dāng)油源出現(xiàn)油溫過高、油壓過低、電機(jī)過流等異常情況時,油源系統(tǒng)均有自我保護(hù)功能。
五、自升降系統(tǒng)
1.采用絲杠立柱副結(jié)構(gòu),絲杠數(shù)量為4支,絲杠直徑不小于180mm,橫截面為實(shí)心,沿加載架反力架通高布置,絲杠能承受不小于3000kN豎向荷載;
2.采用伺服電機(jī)驅(qū)動螺旋升降機(jī)構(gòu)控制橫梁升降,橫梁的升降范圍為0.5-4.5m,保證能完成試件高度為0.5m-4.5m的豎向加載;
3.配置位移傳感器,監(jiān)測四個拉螺母升降同步情況,不同步誤差小于0.1mm;設(shè)有不同步報警及處置模塊,不同步上限可設(shè)定,達(dá)到設(shè)定后,升降電機(jī)會自動停止運(yùn)行;
4.提供上橫梁雙梁、上橫梁自爬升案例說明,總案例不少于3個,并做技術(shù)特點(diǎn)分析。
請輸入賬號
請輸入密碼
請輸驗(yàn)證碼
掃一掃訪問手機(jī)商鋪
微信掃碼進(jìn)入微名片
以上信息由企業(yè)自行提供,信息內(nèi)容的真實(shí)性、準(zhǔn)確性和合法性由相關(guān)企業(yè)負(fù)責(zé),塑料機(jī)械網(wǎng)對此不承擔(dān)任何保證責(zé)任。
溫馨提示:為規(guī)避購買風(fēng)險,建議您在購買產(chǎn)品前務(wù)必確認(rèn)供應(yīng)商資質(zhì)及產(chǎn)品質(zhì)量。

 塑料機(jī)械網(wǎng)
塑料機(jī)械網(wǎng)