 塑料機(jī)械網(wǎng)
塑料機(jī)械網(wǎng)



詳細(xì)介紹
3D相機(jī)包裹分揀原理如下:
雙目攝像頭是利用仿生學(xué)原理,通過標(biāo)定后的雙攝像頭得到同步曝光圖像,然后計(jì)算獲取的2維圖像像素點(diǎn)的第三維深度信息。
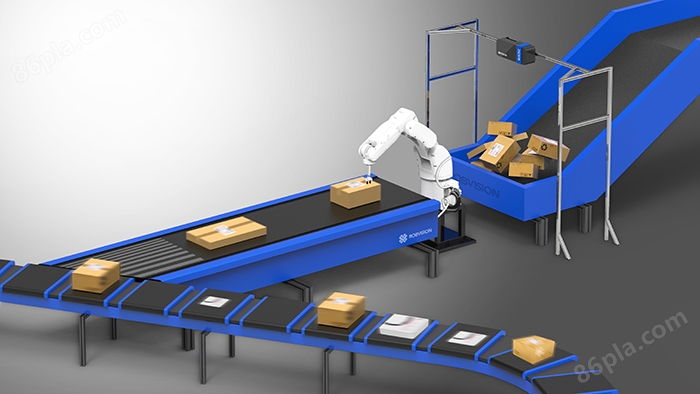
雙目攝像頭利用視覺計(jì)算原理,可以計(jì)算出拍攝場(chǎng)景內(nèi)物體的3維空間位置信息,在此基礎(chǔ)上可以實(shí)現(xiàn)環(huán)境感知、體感、建模、行為識(shí)別等各種應(yīng)用。
3D相機(jī)包裹分揀——智能3D檢測(cè)定位算法
通過深度學(xué)習(xí)讓機(jī)器快速辨識(shí)物件
導(dǎo)入CAD文件,快速定位工件姿態(tài)
位置有利的3D抓取定位
時(shí)間有利的機(jī)械手路徑規(guī)劃
標(biāo)準(zhǔn)的TCP/IP通訊接口,輕松對(duì)接不同品牌機(jī)械手
相機(jī)包裹分揀的輸出是三維點(diǎn)云,其中的每個(gè)點(diǎn)都包含它在三維空間中的[x, y, z]坐標(biāo)信息。 因此,可以分析物體的位置和形狀,或者使用它的位置和旋轉(zhuǎn)角度作為機(jī)器人夾 爪的定位參考信息。
技術(shù)選型:
|
| WuKong-0230B | WuKong-0230C | WuKong-0300B |
| 描述 | 為零件分揀設(shè)計(jì),適用于各種金屬、黑色零件。 | RGBD同時(shí)成像,大視野,適用于快遞、零食、藥品等商品分揀 | 可精確掃描,適用于掃描電子PCB板等小物體。 |
| 像素 | 2.3M | 2.3M | 3M |
| 視野(mm)★ | 375*235~2000*1250 | 375*235~2000*1250 | 389*243*80 |
| 掃描時(shí)間(s)★ | 快0.2 | ||
| 工作距離(s)★ | 0.45~2.4 | 0.45~2.4 | 0.7 |
| Z軸精度★ | 0.4mm@1m | 0.6mm@1m | 0.1mm@0.7m |
| 數(shù)據(jù)接口 | RJ45以太網(wǎng)(Gige) | ||
| 供電 | DC12V 6A | ||
| 體積 | - | - | - |
 塑料機(jī)械網(wǎng)
塑料機(jī)械網(wǎng)